Robot build overview: D-Robotics RDK S100P + Booster K1
· main-author
While attending iREX 2025 (International Robot Exhibition) and DigiconX 2026 in Tokyo Japan, the impressive array of robotics and XR (extended reality) products inspired us to begin a research and development project. Some of the most impressive and accessible products were the Booster K1 robot, and the D-Robotics RDK S100P.
For this project, we’re building an AI embodied robot based on the D-Robotics RDK S100P (robot development kit) and then integrating it with the Booster Robotics K1 embodied robot, SLAMTEC Aurora S, and Meta Quest VR platforms. This is a long term research and development project that will include blog content about the experience, as well as hardware and software documentation about the build and development process.
We will develop the robot in phases starting with basic operation and progress with additional components, capabilities, and form factors. Initially, the robot will resemble a mini PC, then move to a custom mobile enclosure, and eventually interface with the walking Booster K1 robot platform.
The K1 will be introduced in the later phases of the project where the S100P can perform computing tasks and send commands to the K1 in addition to controlling its own sensors.
Some initial project goals:
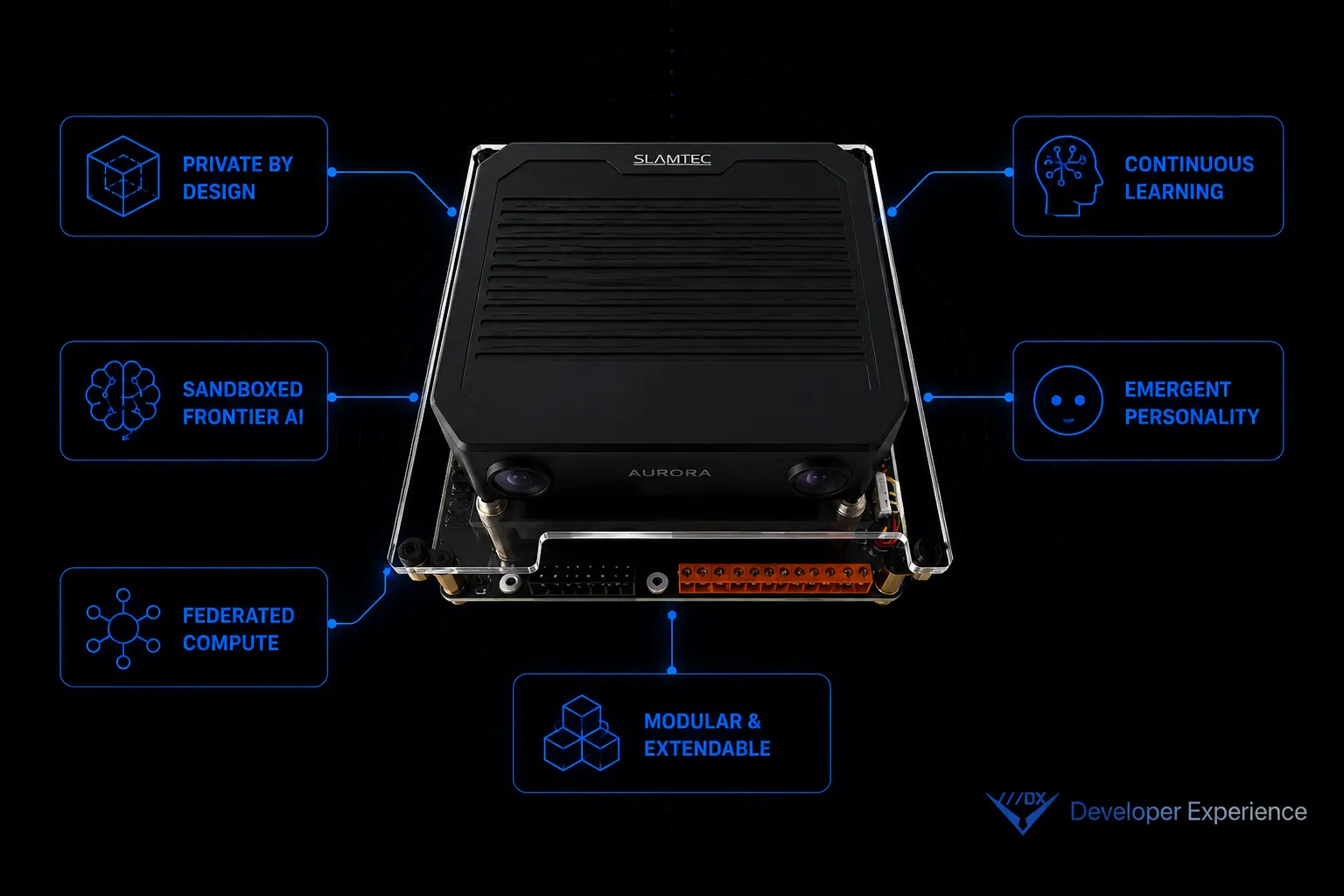
- Autonomous operation and intelligence: The robot runs models locally and its intelligence grows internally.
- Personality and expression: The robot develops a personality it can express visually and audibly. It can make sounds, talk, use text, and provide an animated avatar for screens and VR environments.
- Network access without external cognitive influence: The robot can retrieve data from external sources when needed, but maintains its own reasoning and judgement.
- Enhanced perception: The robot can perceive more of its environment than the typical camera-and-microphone setup.
- Phase-based progression: Development of the robot’s capabilities and mobility progresses in phases.
- Production-ready form factor: The robot will eventually have a chassis that unifies its components.
RDK S100P §

The S100P is a high-end RDK designed for AI embodied robots. What sets it apart from most RDKs is the inclusion of an MCU on the same board as the CPU, BPU, and GPU/NPU. D-Robotics calls this a heterogeneous tri-processor architecture.
S100P specs include the following:
- 128 TOPS BPU
- 6× Cortex-A78AE main CPU cores at 2.0 GHz
- 4× Cortex-R52+ MCU cores at 1.2 GHz
- Mali-G78AE GPU at 100 GFLOPS
- 24 GB LPDDR5 RAM
- 64 GB eMMC plus an M.2 NVMe slot
- Ubuntu 22.04 on a Linux 6.1 kernel
Typically an RDK performs the role of a robot brain; however, the inclusion of an MCU adds real-time motor control, which is comparable to the capabilities of a spine.
The main benefits of this architecture are that AI workloads and low level tasks don’t interfere with each other, and the components of the robot are more compact and simplified, with a unified power supply and fewer cables to accommodate.
Booster K1 §

The Booster K1 is a compact, developer-oriented humanoid robot platform from Booster Robotics designed for embodied AI research, secondary development, and educational robotics. The Geek model in particular targets researchers and advanced builders who want programmatic access to locomotion, joint control, and onboard sensors through an open SDK and ROS 2 interfaces. The pricing of the K1 series is also significantly more approachable than most human sized robots.
The core capabilities of the K1 include the following:
- Dynamic bipedal locomotion with onboard balance and posture control.
- Integrated multi-joint actuation with real-time position, velocity, and torque feedback.
- Inertial sensing and state estimation via onboard IMU.
- SDK and ROS 2 interfaces for state monitoring and command control.
- Network-based remote control over Ethernet or Wi-Fi.
- External compute support for high-level control and AI processing.
This makes the K1 particularly suitable for pairing with a high-performance AI system like the S100P. In later project phases, the S100P can:
- Subscribe to robot state telemetry.
- Run perception and decision models locally.
- Send high-level locomotion or posture commands back to the K1.
In the Humanoid Platform phase, the Booster K1 becomes the embodied chassis for the project by transforming the S100P from a portable AI unit into a physically expressive humanoid system. The S100P operates as the primary cognitive processor, while the K1 provides locomotion, physical presence, and human-scale interaction.
This separation preserves real-time motor safety on the K1 while enabling advanced AI experimentation and personality-driven behavior from the S100P.
Phases and components §
We plan on developing the robot in the following phases. The phases may change as the project progresses.
| Phase | Description | Components |
|---|---|---|
| 1. RDK setup | Get the RDK running with basic peripherals, network connectivity, and the ability to update the software. |
|
| 2. Spatial sensory | Set up a spatial perception sensor that gives the robot awareness of its physical surroundings. It can track its own position and orientation, build 3D maps of nearby spaces, identify surfaces and objects, and measure distances. |
|
| 3. Sensory expansion | Set up additional sensors and communication devices that are more advanced and portable than some of the initial components. |
|
| 4. AI embodiment | Set up the development stack and develop the AI representation of the robot and its interaction with its components. |
|
| 5. Portability | Integrate the RDK and components into a portable robot chassis giving it the ability to run without being physically connected to outside power sources, and for outdoor use. |
|
| 7. Humanoid platform | Integrate the K1 robot platform, providing the project with physical humanoid representation and interaction. |
|
| 6. XR integration | Create a VR environment with an NPC that is embodied by the robot. This will allow the user to interact with the robot remotely through its avatar on a VR device. |
|
We already have the RDK up and running, and are testing some of the initial components, so we will publish the first guide shortly.